
Consejos en el desarrollo de robots en la automatización y optimización de procesos

El desarrollo de robots para la automatización está en auge, impulsado por la necesidad de optimizar procesos y reducir costos. Sin embargo, integrar estas tecnologías en líneas de producción existentes presenta desafíos. Soluciones innovadoras buscan simplificar la programación y el control de robots, permitiendo a las empresas diseñar, implementar y mantener sus propios sistemas. Estas herramientas mejoran la eficiencia operativa y reducen los tiempos de inactividad, adaptándose a diversas configuraciones robóticas y aumentando el rendimiento en sectores industriales clave.
Dentro de la creciente demanda de robots, muchas empresas buscan instalar robots sobre líneas de producción ya existentes, lo cual es difícil de cubrir a través de las soluciones en el mercado actuales. En estos casos la solución pasa por soluciones de fabricación propia. A la hora de automatizar nuevos procesos y para resolver esta demanda, Oriental Motor recomienda el desarrollo de procesos de producción centrados en la reducción de costes, el ahorro de espacio y, especialmente, la reducción de la carga de programación.
Con el objetivo de facilitar el diseño, las pruebas y la implementación de robots de desarrollo propio, Oriental Motor ha desarrollado el controlador de robot MRC01 y el software de programación MRC Studio para accionamientos de la familia AZ Alpha Step, eliminando barreras incluso para aquellos diseñadores de equipos que realizan este tipo de proyectos por primera vez.
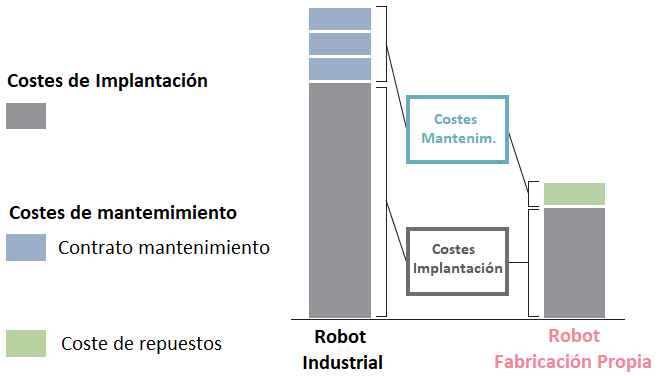
Ahorro en mantenimiento y propiedad
El coste inicial no solo conlleva el coste de implantación del robot. En caso de malfuncionamiento es bastante habitual recurrir al fabricante o a una compañía externa para realizar tareas de mantenimiento, lo que se traduce en tiempo y dinero. La fabricación propia de estos robots reduce los costes de mantenimiento después de la implantación y por lo tanto el coste total de propiedad. Cuando el desarrollo es propio, son los empleados los que pueden identificar las causas de fallo y proceder al remplazo de componentes, reduciendo el tiempo de parada en caso de fallo del robot hasta la nueva puesta en marcha.
Programación simplificada
La dificultad de programación y control de ejes múltiples interrelacionados son un impedimento en la construcción de robots. La función del controlador del robot es desarrollar la posición, velocidad y trayectoria del ‘punto central de la herramienta’ o TCP (tool central point) según se desee, olvidándonos del control individual de cada motor que acciona cada articulación del robot. Esto conlleva cálculos cinemáticos que no son sencillos y que dependen de la estructura (número de ejes, dimensiones de brazos) y tipo de robot (SCARA, articulado vertical, cartesiano), de modo que cuanto más complejo sea, más complicados son estos cálculos. Debe ocuparse, además, de la selección del sistema de coordenadas adecuado según el tipo de robot y operación a la hora de enseñar las posiciones y movimientos que debe realizar la mano y el efector final. El controlador MRC01 permite la elección de estos sistemas y la definición y dimensiones de elementos en las operaciones de enseñanza del robot.
Los perfiles de velocidad y ángulo de cada articulación constituyen básicamente un cálculo complejo que cambia en el tiempo. De modo que en el control del robot es esencial un avanzado control de movimiento para poder operar los motores sincronizadamente en cada sección de acuerdo con el perfil de posicionamiento.
Por otra parte, cuando todos los elementos se controlan mediante PLC, es necesario desarrollar simultáneamente la cinemática y creación de programas del robot y equipos periféricos, incrementando la carga de trabajo del programador del PLC. La utilización del controlador MRC01 junto con el software MRC Studio permite crear programas de movimiento del robot y testearlos independientemente del controlador principal. Esto permite mejorar la eficiencia en la puesta en marcha del equipo, dado que se pueden repartir las tareas del robot y PLC entre diferentes personas.
Protección ante singularidades
Otra de las dificultades en el desarrollo del robot que debe tenerse en cuenta es el estudio de aquellas posiciones no controlables de la estructura del propio robot, denominadas singularidades, que hacen que la velocidad se incremente al acercarse a estos puntos haciendo el movimiento incontrolable. El controlador MRC01 dispone de la función ‘Singularity protective function’ que para la operación y notifica mediante una alarma antes de que el robot se aproxime a la singularidad, además de otras funciones de seguridad como el ‘Slip Mode’, que tienen en cuenta la desviación de posición, en caso de contacto con otros equipos y personas, así como límites de posición y velocidad.
Oriental Motor ofrece un controlador de robot con un software de programación fácil de manejar para desarrolladores sin experiencia previa en el control de robots. Reduciendo la curva de aprendizaje ya que independientemente del diferente tipo de robot, sea cartesiano, SCARA o de articulación vertical, el modo de operación del software MRC Studio así como la conexión y modos de comunicación entre el PLC y el controlador MRC01 son los mismos.
----
Este artículo aparece publicado en el nº 558 de Automática e Instrumentación, pág 60 y 61.



La digitalización y la automatización se presentan como claves a la hora de garantizar la continuidad operativa

Destaca su nueva generación de barreras y cortinas de seguridad



Hemos pasado de soluciones aisladas a aplicaciones cada vez más conectadas dentro de fábrica y hacia el exterior


“Esperamos recibir a más de 30.000 profesionales industriales que acudirán en busca de socio industrial y tecnológico”
Empresas destacadas

Comentarios