
Pepperl+Fuchs incorpora las interfaces GenICam y Ros en sensores de perfil laser y de visión 3D

Pepperl+Fuchs ha equipado el sensor de perfil láser SmartRunner Explorer y el sensor de visión 3D SmartRunner Explorer con las interfaces GenICam y ROS independientes del fabricante. Esto permite un acceso universal a los datos y parámetros, así como a una variedad de módulos de programación en bibliotecas de software. Esto ahorra a los usuarios tiempo y dinero a la hora de implementar aplicaciones de visión industrial.
Esta solución que ofrece la compañía responde a la amplia gama de posibilidades para la implementación de aplicaciones de visión individuales que ofrece la salida de datos brutos pero que a la vez implica un esfuerzo relativamente alto para evaluar dichos datos.
GenICam
Cada sensor de visión es diferente, por lo que los usuarios a menudo tienen que familiarizarse con las estructuras de datos de los sistemas propietarios antes de poder evaluar los datos brutos. Para minimizar este esfuerzo se desarrolló la interfaz de programación universal GenICam. Este estándar de la Asociación Europea de Visión Artificial (EMVA) reúne los datos y parámetros específicos del producto en una estructura genérica y permite una edición y un procesamiento estandarizados.
GenICam también se puede utilizar para conectar SmartRunner Explorer y SmartRunner Explorer 3-D a bibliotecas de procesamiento de imágenes como HALCON. Las aplicaciones de procesamiento de imágenes se pueden implementar de forma rápida y sencilla utilizando los módulos de programación listos para usar disponibles allí. Como GenICam permite utilizar el mismo marco para diferentes sensores, se pueden integrar fácilmente nuevos dispositivos en aplicaciones existentes.
Robot Operating System (ROS)
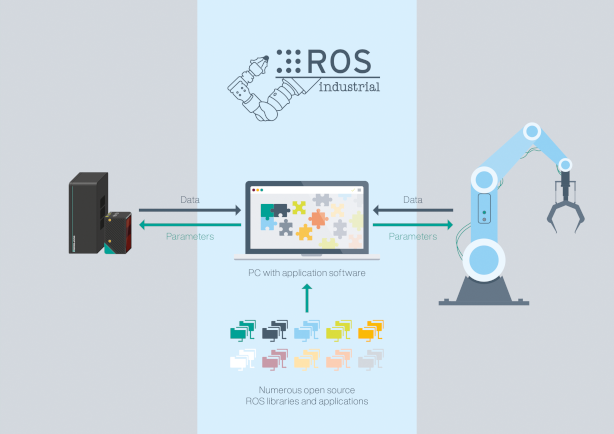
Desde aplicaciones de pick-and-place hasta control de calidad y prevención de colisiones: el sensor de perfil láser SmartRunner Explorer y el sensor de visión 3D SmartRunner Explorer se encargan de tareas exigentes en robots de producción o vehículos guiados automáticamente (AGV). Estas aplicaciones suelen ser complejas y costosas de implementar. Las diferentes interfaces y la gran cantidad de proveedores de sensores y actuadores dificultan aún más la implementación.
En este caso, el marco de trabajo Robot Operating System (ROS) de código abierto entra en juego: comprende una gama de bibliotecas de software, herramientas y programas que están disponibles como software de código abierto. Esto permite implementar aplicaciones de forma rápida y sencilla en PC o PC industriales.
ROS también ofrece ventajas para aplicaciones que van más allá de la robótica. Por ejemplo, las herramientas de código abierto se pueden utilizar para realizar pruebas de concepto rentables que se pueden utilizar como base para decisiones de inversión.
Los aspectos destacados de las interfaces universales son:
- Ahorro de tiempo y costes gracias al acceso a módulos de programación en bibliotecas de procesamiento de imágenes.
- Prueba de concepto rápida y sencilla para nuevas aplicaciones.
- Integración de sensores de visión independiente del fabricante.
- No es necesario familiarizarse con interfaces específicas del fabricante.

El plazo de presentación de candidaturas finaliza el 13 de mayo



")

A lo largo de esta semana, Advanced Factories 2025 está analizando con 427 expertos el potencial de las green tech para conseguir procesos más eficientes
")

Barcelona acoge hasta el 10 de abril la gran cita sobre automatización industrial del sur de Europa

Empresas destacadas

Comentarios